As early as 1989, the pioneer of industrial robots, Joe Engelberger, predicted that the largest application area for robots in the future would be non-industrial. This prediction accurately reflects the development direction of the robot. After decades of continuous development of technology, robots are moving from the workshop to the field and service places. Engineering robots are one of the important branches.
With the improvement of science and technology and the rapid development of the world economy, engineering robots are more and more widely used in many industries, especially in high-risk, harsh environments and boring and heavy work areas, the demand for engineering robots is more urgent. . Therefore, the development and application of engineering robots have attracted great attention from all over the world, and the product development prospects are very broad.
1 Definition and classification of engineering robots
The engineering robot is a teleoperation multi-joint robot or multi-degree-of-freedom robot that is designed for high-risk and special environments to rely on its own power and control capabilities for engineering construction work. It not only has the advantages of high power, multi-function, wide application range of engineering machinery, but also has various functions such as flexible movement of robot, environment perception and intelligent recognition.
Engineering robots are new members of the robot family. Unlike industrial robots operating in a fixed environment in accordance with pre-programmed procedures, engineering robots work primarily in non-structural environments, relying on human command, or acting on principles that are based on artificial intelligence techniques. Therefore, engineering robots emphasize the ability of perception, thinking and complex actions. They need more flexibility and mobility than industrial robots in general, and have stronger ability of perception, decision-making, reaction and mobility. The engineering robot is also far removed from the shape of the original industrial robot. Engineering robots incorporate knowledge of more disciplines such as institutional science, control engineering, computer science, artificial intelligence, microelectronics, optics, sensing technology, materials science, and bionics.
According to the application field, engineering robots can be divided into: agricultural and forestry engineering robots, industrial engineering robots, construction engineering robots, mining engineering robots, nuclear industrial engineering robots, rescue engineering robots, military engineering robots, etc.; Robots, handling robots, grab handling robots, detection robots, etc.
2 Basic structure and working characteristics of engineering robot
The basic features of engineering robots are hydraulic drive, teleoperation, and mobile work, featuring high-power operation, wide-range operation, multi-function operation, and intelligent operation.
The basic components of an engineering robot include: control system, drive unit, actuator, and sensing system, as shown in Figure 1.
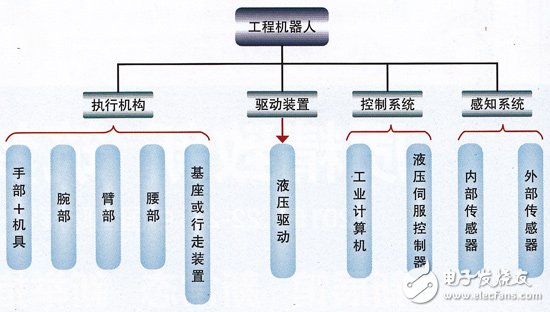
Figure 1 The basic composition of the construction robot
Drive system: Most of the engineering robots are hydraulically driven. The features are: large drive power, high power density, easy to achieve large-scale stepless speed regulation and force control, and good anti-overload performance. Since the hydraulic drive can realize direct drive, the reduction mechanism of the industrial robot and the transmission mechanism of the servo motor are omitted, so that the drive system is simple and compact. With the continuous improvement of hydraulic servo control technology and the development of numerical hydraulic technology, hydraulic drive will be more representative of the development direction of energy-saving, lightweight, compact and intelligent robots.
Execution system: Compared with industrial robots, the engineering robot execution system mainly increases the walking system. Especially in different environments, engineering robots are required to have an all-terrain walking function. The vcb shown in Figure 2 is a typical engineering robot - the actuator of the demolition robot.

Figure 2 Typical actuator of the demolition robot
This typical actuator consists of the hand, the wrist, the lower arm (upper arm), the upper arm (lower arm), the waist, the foot, and the like. The hand is an end effector, such as a gripping tool. Different attachments can be replaced, such as hydraulic shears, hydraulic hammers, hydraulic grabs, etc., to achieve different working capabilities. The wrist usually has 3 degrees of freedom for hand movements and is the most complex part of the actuator. The arm is used to connect the waist and the wrist to drive the wrist for planar movement. The waist is used to connect the arm to the base and make a rotary motion. It is a key component of the actuator. The foot includes a walking system and a leg for supporting the body during work.
Control system: The control system of engineering robots is generally complex, involving walking, obstacle avoidance, and effective operation. It requires the control system to have strong reasoning and thinking ability, strong real-time response capability, and strong ability to adapt to non-structural environments. The control system is the core of the function realization of the robot system. If the mechanical structure of the robot is compared to the bones and muscles of the human body, the robot control system is equivalent to the human nervous system. To realize its own movement, the perception of the environment and the interaction with the outside world, the robot needs the control system to coordinate and control the various mechanical components and sensor units.
Perceptual System: The perceived ability of engineering robots is one of the research priorities of intelligent robots in the future. The robot sensor plays a very important role in the control of the robot. The robot sensor is divided into two categories: internal sensor and external sensor. The internal sensors mainly include position sensors, speed sensors, force sensors, temperature sensors, and balance sensors. The internal sensor detects the internal state of the robot with the measured angle, angular velocity, force, etc., and knows the position and posture of the actuators of the robot, the speed of motion, etc., to adjust and control the robot's own actions. External sensors mainly include visual sensors, tactile sensors, auditory sensors, cold sensing sensors, disease (abnormal) sensors, taste sensors, olfactory sensors, and the like. External sensors are used to detect the environment in which the robot is located, the state of external objects, or the relationship between the robot and external objects.
The current state of engineering robot research indicates that it is difficult to achieve a robot that can work in an autonomous manner in an unknown environment due to limitations of mechanisms, controls, sensors, and artificial intelligence. Therefore, teleoperation robots are widely used in high-risk and harsh environments such as nuclear industry and disaster relief. The teleoperation robot is mainly divided into a visual telepresence teleoperation robot, a force perception telepresence teleoperation robot, a tactile telepresence teleoperation robot, and a motion sense telepresence teleoperation robot. The principle of teleoperation robot system based on presence is shown in Fig. 3. It consists of operator, master robot (hand controller), communication link, slave robot and working environment. During the operation of the telepresence system, the operator issues an operation command (such as a position command) to the main robot to operate the main robot motion, and the motion information of the main robot is transmitted to the remote slave robot through the communication link, thereby controlling the movement of the slave robot; When the robot interacts with the environment, the motion information of the robot (such as visual, force, touch, etc.) is fed back to the local master robot through the communication link, so that the operator has an effective perception of the field operation, so that it can be done in time. Accurate judgment, issue corresponding operation commands, control the remote to complete the task from the robot accurately and efficiently. At present, the remote operation control of engineering robot based on visual presence is mainly to obtain the video image of the scene by the camera and return it to the main control end. The operator completes the operation task of the engineering robot through the monitor.

Fig. 3 Block diagram of remotely operated robot system based on presence
Among them, the communication link, as the data exchange and connection link of the presence system, is the transmission channel of the control quantity information, the sensor information and the video and image information, and is the basic guarantee for the reliable operation of the presence system.
3 Overview of development of engineering robots at home and abroad
In foreign countries, as early as the 1970s, Europe, the United States, Japan and other countries began to develop various types of engineering construction automatic operation machinery on the basis of engineering machinery, and formed two major development directions. First, the construction machinery was intelligent, and the first was developed specifically. Engineering robot branch. For high-risk and harsh environment construction work, Europe, the United States, Japan and South Korea have all adopted engineering robots or robots with advanced technology.
Among them, the demolition robot is one of the most widely used engineering robots in engineering construction. Due to the wireless remote control operation, the demolition robot can be applied in many fields such as metallurgy, mining, construction, transportation and rescue. The Swiss company Bruker is currently the world's leading manufacturer of demolition robots. The company has developed, developed and produced remote-controlled electro-hydraulic multi-functional demolition robots since the 1970s. Through continuous improvement and development, it has accumulated a wealth of Experience, whether it is design, material selection or manufacturing level, is in the international leading position. It is currently the largest supplier of dismantling robots, and its products are sold all over the world [3]. In addition, developed countries such as Japan and Germany are also in the forefront of the world in the field of demolition robots. TOPTEC1850E, TOPTEC2500E engineering robots produced by TOPTEC of Germany, TmsukT52 and T53 double-mechanical robots of Japan, etc., have advanced technology. The end effector of the demolition robot is usually a hydraulic hammer, a hydraulic shear, etc., to achieve crushing and dismantling work. By replacing the end effector with other special attachments such as hydraulic grippers, and then making the appropriate changes to the main structure and control system according to the working environment, it can be transformed into other types of robots, such as handling robots, grab handling robots, and so on.

Demolition robot
In the field of rescue and rescue, some people have been discussing the application of robots in rescue work in the 1980s, but the formal research on rescue robot technology began in 1995 in the Kobe-Osaka earthquake in Japan, and in the United States in 2001. In the 11th incident, the rescue robot was officially put into use. As a country with many earthquake disasters, Japan attaches great importance to the development of rescue robots, and its technical level has always been a world leader. After the September 11th incident, the United States paid more attention to the research of rescue robots. Among them, the highly representative Packbot series of small portable belt robots developed by Irobot and the "Warrior (6 Warrior)" have been well applied. Other countries also attach great importance to the research of rescue robots. For example, MicroVGTV developed by Inuktun of Canada and AZIMUT robot developed by Sherbrook University, ALACRANE of Spain, Shrimp of Switzerland, Welbarrow Mk7 detonation robot of Britain, MV4 robot of TEODORG of Germany, and MK4D of Germany Robots, etc.

Rescue robot
In agriculture and forestry, in the developed countries of post-industrialization, with the increasing industrialization, scale and precision of agroforestry production, the development of agroforestry robots has become one of the key contents of its research, in logging, seedling, and migration. Seedlings, grafting, harvesting of agricultural products, etc. have been tested and applied, and a variety of products such as logging robots, grafting robots, cutting robots, transplanting robots and picking robots have been developed.
In China, the research and development of engineering robots has just started. Engineering machinery mainframe factories and some scientific research institutes have begun to increase investment in research and development of intelligent engineering machinery, but there are few enterprises and research institutions specializing in R&D and manufacturing of engineering robots. Application is also limited to some conventional industrial applications, and the products are almost all imported.
Jingtian Intelligent Equipment Co., Ltd. started its own development of demolition robots in 2005. At present, it has developed a variety of engineering robot products, and has entered the stage of industrialization and application promotion.
In the field of emergency rescue, the domestic research on disaster relief robots started late, but it received a high degree of attention. For example, the national "863" program supports a series of measures such as the development of earthquake rescue assisted robots, and major universities, research institutes, and enterprise units in China have conducted active research, and great progress has been made in recent years. The “Lobster†rescue robot, the key project of the national “Twelfth Five-Year†Science and Technology Support Program, is currently the largest rescue and rescue machine in the world.
4 Application of engineering robot
Engineering robots are mainly used in various high-risk and special environment construction fields, such as high temperature and high pressure, flammable and explosive, easy to collapse, toxic and harmful gases, nuclear radiation, dangerous goods handling and military applications. Therefore, in the destruction of metal slag ingots, building demolition, Tunnel construction, underground operations, emergency rescue, as well as agroforestry, nuclear industry, etc. have been widely used.
4.1 Industrial crushing operations
In steel smelters, the main uses of engineering robots include: main ditch and slag ditch crushing, iron tapping, furnace slag removal, furnace unpacking, torpedo hot refractory materials, disintegration of mixed iron vehicles, etc. Used in the non-ferrous industry for waste heat boiler cleaning, anode furnace cleaning, metal ingot crushing, flue and chute cleaning. Used in the aluminum industry for clearing aluminum bags, cleaning anodes, in-line planing, planing holding furnaces and overhauling of concentrated tanks.
In the cement plant, the demolition robot is a new generation of brick-removing equipment for cement rotary kiln maintenance. It is used for remote control to replace manual and small excavation and maintenance of rotary kiln, which greatly shortens the time of stopping the kiln and brings huge economic benefits to the enterprise.
4.2 rescue application
The rescue work at the disaster site is a major problem in the field of robot development. The robot solution is very different under different environmental conditions. At present, multi-function working robots have been widely used in fire rescue and rescue, post-disaster repair and construction, post-earthquake rescue, anti-terrorism and explosion, and nuclear accident emergency rescue.
4.3 Building applications
With the rapid development of the economy, the construction requirements are getting higher and higher, and the renovation of building buildings is increasing, but the labor cost is rising year by year. Working with engineering robots is not only safe and reliable, but also shortens the construction period and reduces manpower requirements. Compared with traditional concrete cutting saws, wind hoes and excavators, the use of demolition robots enables construction to be carried out without vibration, low noise, no exhaust, no dust, etc., minimizing the impact on the surrounding environment. Moreover, the construction cost is reduced and the work efficiency is greatly improved. In order to avoid the impact of local demolition on the entire foundation, in recent years, hydraulic demolition robots have been increasingly valued by the industry.
4.4 Tunnel Application
Engineering robots have a wide range of applications in tunnel construction, and are ideal for excavating communication channels, safety diverticulum, and tunnel maintenance. It is often used in the demolition of temporary walls of subway tunnels, the development of tunnels, the support of roadways, the drainage and the excavation of cable tunnels. It has great advantages in places where the space is small and the drilling and blasting construction process cannot be used.
Generally, the engineering robot car is small and powerful, and it is flexible and can enter the narrow working face and dangerous place where large equipment cannot reach, improve work efficiency and reduce production cost. It can be equipped with buckets, splitters, hydraulic hammers, hydraulic drills, etc., and in the tunnel construction, the advantages of "one machine and more energy" can be exerted.
4.5 Mine application
Engineering robots have a wide range of applications in underground mines and can be used for roadway support, bristles, secondary crushing, drilling and anchoring, and blastholes. Many non-ferrous metal mines and gold mines can use engineering robots to break large blocks, cut anchor cables, dig trenches, repair ramps, and renovate deformed roadways. At the same time, the robot can be used as a fixed crushing station next to the screen of the well, or as an ore mining and antimony ore of a narrow vein. The robot is operated by wireless remote control. When working in underground mines, the operator can choose the safe and sight-friendly position to operate the machine to avoid the damage caused by falling rocks.
4.6 Nuclear Industry
Due to the complex structure of the nuclear power plant equipment, the equipment itself or its operating environment is radioactive, and also has the characteristics of underwater, high temperature, high pressure, etc., simple robots often can not complete the relevant operations, using robots for equipment maintenance, spent fuel transfer, radioactive waste disposal And the emergency handling of nuclear accidents can greatly improve the maintenance level or accident handling efficiency of nuclear power plants, and reduce the exposure dose and labor intensity of workers.
5 Summary and outlook
The biggest feature of engineering robots is that they work in a non-structural environment and the working environment is more complicated. In a sense, the technical level of a national engineering robot reflects the technical level of this national robot. Engineering robots have been widely used in the nuclear industry, emergency rescue, construction engineering, agriculture, metallurgy industry, etc. due to their advanced performance. With the advancement of technology and technology accumulation, engineering robots will play a greater role in the future.
China's engineering robots started late. After decades of development, although they have achieved certain results, compared with foreign developed countries, the gap is still very large. Undoubtedly, the 21st century robot technology will surely achieve greater development and become the high-tech commanding height of all countries. We must keep up with the trend of world science and technology development, increase investment in major issues of strategic, basic, and critical functions, and do not fear hardships, work hard to solve problems, and improve the ability of independent innovation. At the same time, we must also strengthen exchanges and cooperation with the international scientific and technological community, and strive to learn and use the world's advanced scientific and technological achievements to make due contributions to the development of China's robotics industry.
Solar Powered Security Light,Solar Motion Lights,Best Solar Landscape Lights,Solar Landscape Lights
jiangmen jieken lighting appliance co.,ltd , https://www.jekenlighting.com